Worm ගියර් සම්ප්රේෂණය worm එකකින් සහ worm රෝදයකින් සමන්විත වන අතර, සාමාන්යයෙන් worm ක්රියාකාරී කොටස වේ. worm ගියරයේ දකුණු අත සහ වම් අත නූල් ඇති අතර ඒවා පිළිවෙලින් දකුණු අත සහ වම් අත worm ගියර් ලෙස හැඳින්වේ. worm යනු worm රෝදය සමඟ සම්බන්ධ වී එකතැන පල්වෙන පතුවළ ගියර් යුගලයක් සාදමින් හෙලික්සීය දත් එකක් හෝ කිහිපයක් සහිත ගියරයකි. සුචිගත කිරීමේ මතුපිට සිලින්ඩරාකාර, කේතුකාකාර හෝ රවුම් විය හැකි අතර, ආකිමිඩීස් පණුවා, ඉන්වොල්යුට් පණුවා, සාමාන්ය සෘජු පැතිකඩ පණුවා සහ ටේපර්ඩ් ආවරණය කරන සිලින්ඩරාකාර පණුවා කාණ්ඩ හතරක් ඇත.
පණුවා ගියර් සම්ප්රේෂණයේ වාසි.
✦ තනි-අදියර සම්ප්රේෂණ අනුපාතය විශාලයි, සාමාන්යයෙන් i=10~100. බල සම්ප්රේෂණය සඳහා සුචිගත කිරීමේ යාන්ත්රණයේදී, උපරිමය 1500 ට වඩා වැඩි විය හැක.
✦ එකම දැල යනු රේඛීය ස්පර්ශයයි, එය විශාල බලයකට ඔරොත්තු දිය හැකිය.
✦ සංයුක්ත ව්යුහය, සුමට සම්ප්රේෂණය සහ අඩු ශබ්දය.
✦ පණුවාගේ එසවුම් කෝණය ගියර් අතර සමාන ඝර්ෂණ කෝණයට වඩා අඩු වූ විට, එය ප්රති-පහර සමඟ ස්වයං-අගුලු දැමීම සිදු කරයි, එනම්, පණුවා රෝදය ධාවනය කළ හැක්කේ පණුවාට පමණි, පණුවා රෝදයට නොවේ.
පණුවා ගියර් ධාවකයේ අවාසි.
✦අක්ෂ දෙකක් ලම්බකව ඇති විට, රෝද දෙකේ නෝඩ් වල රේඛීය ප්රවේගය ලම්බක වේ, එබැවින් සාපේක්ෂ ලිස්සා යාමේ වේගය විශාල වන අතර රත් කිරීමට සහ ඇඳීමට පහසුය.
✦ අඩු කාර්යක්ෂමතාව, සාමාන්යයෙන් 0.7 සිට 0.8 දක්වා; ස්වයං-අගුළු දැමීමේ වර්ම් ගියර් සහිත වර්ම් ගියර් ඊටත් වඩා අඩු කාර්යක්ෂම වේ, සාමාන්යයෙන් 0.5 ට වඩා අඩුය.
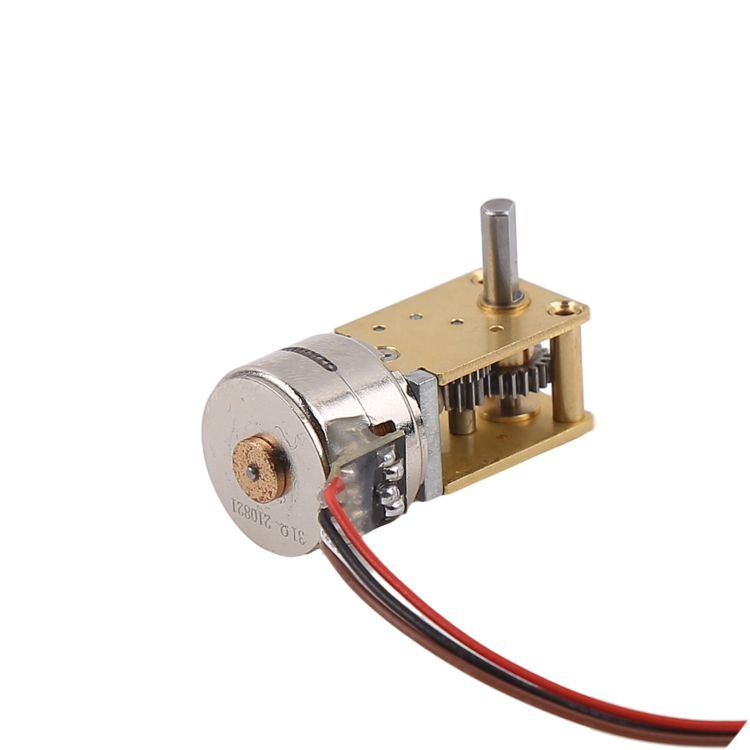
අපණුවා ගියර් ස්ටෙපර් මෝටරයඅනිවාර්යයෙන්ම ස්වයං-අගුළු දැමීමේ කාර්ය සාධනයක් තිබේද?
නැත, පූර්ව අවශ්යතා තිබේ. ඊයම් කෝණය ඝර්ෂණ කෝණය වූ විට,පණුවා ගියර් ස්ටෙපර් මෝටරයස්වයං-අගුලු දැමිය හැකිය.
සාමාන්යයෙන් ගියර් අඩු කිරීමේ ස්ටෙපර් මෝටරය තෝරා ගත් විට, පරිශීලකයා බල අසාර්ථකත්ව ආරක්ෂාව හෝ තිරිංග මෝටරය භාවිතා කළ යුතුය, එබැවින් නැවැත්වීමේ අරමුණ සාක්ෂාත් කර ගැනීම සඳහා ගියර් අඩු කිරීමේ මෝටරය තිරිංගයක් සමඟ තෝරා ගනු ලැබේ, නමුත් නිරපේක්ෂ නැවතුමක් අදහස් නොවේ, සුළු අවස්ථිති බවක් තවමත් පවතී.
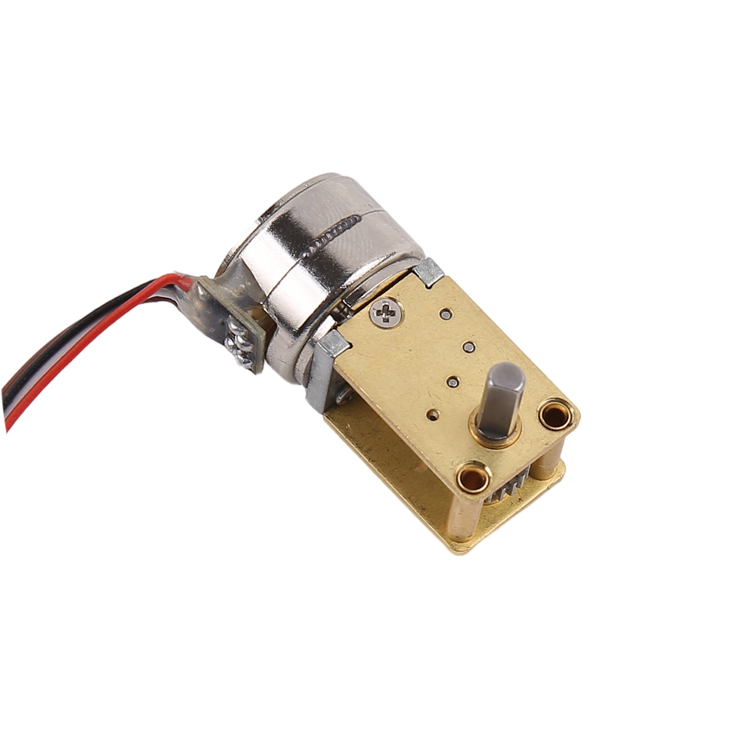
ස්වයං-අගුලු දැමීම යනු කුමක්ද?ස්වයං-අගුළු දැමීමේ සංකල්පය නම්, කොපමණ බලයක් ආරම්භ කළ නොහැකි වුවත්, කොපමණ අවස්ථිති බවක් තිබුණත්, ක්රියාකාරී කොටස ක්රියාත්මක වීම නැවැත්වීමට ක්රියා කරන තාක් කල්, මුළු යන්ත්රයම තිරිංග කළ හැකි බවයි, worm gear geared stepper motor මෙම ස්වයං-අගුළු දැමීමේ කාර්ය සාධනය ඇත. ගියර් කරන ලද ස්ටෙපර් මෝටර සඳහා ස්වයං-අගුළු දැමීමේ කාර්ය සාධනයක් නොමැති අතර, 1:30 සහ ඊට වැඩි වේග අනුපාත සහිත worm ගියර් අඩු කරන්නන් සඳහා විශ්වාසදායක ස්වයං-අගුළු දැමීමේ කාර්ය සාධනයක් ඇති අතර, අඩු කිරීමේ අනුපාතය විශාල වන තරමට ස්වයං-අගුළු දැමීමේ කාර්ය සාධනය වඩා හොඳය.
worm gear stepper motor හි ස්වයං-අගුලු දැමීමේ ක්රියාකාරිත්වය සහතික කිරීම සඳහා අඩු කිරීමේ අනුපාතය තෝරා ගන්නේ කෙසේද?
1, පණුවා ගියර් ඝර්ෂණ සංගුණකය 0.6, පණුවා ගියර් මාර්ගෝපදේශ කෝණය 3°29′11″ ට වඩා අඩුය, එය ස්වයං-අගුලු දැමීමකි, සහ අනෙක් අතට.
2, පණුවා ගියර් ඝර්ෂණ සංගුණකය 0.7, පණුවා ගියර් මාර්ගෝපදේශ කෝණය 4°03′57″ ට වඩා අඩුය, එය ස්වයං-අගුලු දැමීමකි, සහ අනෙක් අතට.
3, පණුවා රෝදයේ ඝර්ෂණ සංගුණකය 0.8 වන විට, පණුවාගේ ඊයම් කෝණය 4°38′39″ ට වඩා අඩු වේ, එනම් ස්වයං-අගුලු දැමීම, සහ අනෙක් අතට.
පණුවාගේ ඊයම් කෝණය දැල් රෝදයේ දත් අතර සමාන ඝර්ෂණ කෝණයට වඩා අඩු වූ විට, අඩු කිරීමේ ස්ටෙපර් මෝටර් යාන්ත්රණයට ස්වයං-අගුලු දැමීමක් ඇති අතර, එමඟින් ප්රතිලෝම ස්වයං-අගුලු දැමීම ලබා ගත හැකිය, එනම් පණුවාට පමණක් පණුවා රෝදය ධාවනය කළ හැකි නමුත් පණුවා රෝදය පණුවා ධාවනය කළ නොහැක. සාමාන්යයෙන් බර යන්ත්රෝපකරණ නිර්මාණය කිරීමේදී, නිර්මාණකරුවන් ස්වයං-අගුලු දැමීමක් සහිත පණුවා ගියර් යාන්ත්රණය භාවිතා කිරීමට නැඹුරු වෙති, මන්ද එහි ප්රතිලෝම ස්වයං-අගුලු දැමීම ආරක්ෂිත ආරක්ෂාව සඳහා ඉතා වැදගත් කාර්යභාරයක් ඉටු කළ හැකිය.
පණුවා රෝදය සහ පණුවා ගියර් ගණනය කිරීමේ සූත්රය.
1. සම්ප්රේෂණ අනුපාතය = පණු ගියර් දත් ගණන ÷ පණු හිස ගණන
2、මධ්ය දුර = (පණු රෝද තාරතාව + පණු ගියර් තාරතාව) ÷ 2
3、පණු රෝද විෂ්කම්භය = (දත් ගණන + 2) × මාපාංකය
4, පණුවා රෝද තාරතාව=මොඩියුලය×දත් ගණන
5, පණුවා තාරතාව=පණුවාගේ පිටත විෂ්කම්භය-2×මොඩියුලය
6,පණු මාර්ගෝපදේශය = π×මොඩියුල×හිස
7、හෙලික්ස් කෝණය (මාර්ගෝපදේශ කෝණය) tgB=(මොඩියුලස්×හිස අංකය)÷පණු තාරතාව
8、පණු ඊයම්=π×මොඩියුලය×හිස
9, මොඩියුලස්=සුචිගත කිරීමේ කවයේ විෂ්කම්භය/දත් ගණන
පණුවන්ගේ හිස් ගණන: තනි හිසක් සහිත පණුවා (පණුවා මත ඇත්තේ එක් හෙලික්සයක් පමණි, එනම් පණුවා සතියක් භ්රමණය වන අතර පණු රෝදය එක් දතක් හරහා භ්රමණය වේ); ද්විත්ව හිසක් සහිත පණුවා (පණුවා මත හෙලික්ස දෙකක් ඇත, එනම් පණුවා සතියක් භ්රමණය වන අතර පණු රෝදය දත් දෙකක් හරහා භ්රමණය වේ).
මොඩියුලස් යනු ඉස්කුරුප්පු ඇණ මත ඇති හෙලික්සයේ ප්රමාණයයි, එනම් මොඩියුලස් විශාල වන තරමට ඉස්කුරුප්පු ඇණ මත ඇති හෙලික්සය විශාල වේ.
විෂ්කම්භය සාධකය වන්නේ ඉස්කුරුප්පුවේ ඝණකමයි.
මොඩියුලය: ගියරයක සුචිගත කිරීමේ කවය යනු ගියරයේ එක් එක් කොටසෙහි මානයන් සැලසුම් කිරීම සහ ගණනය කිරීම සඳහා මිණුම් ලකුණ වන අතර, ගියර් සුචිගත කිරීමේ කවයේ පරිධිය = πd = zp, එබැවින් සුචිගත කිරීමේ කවයේ විෂ්කම්භය
d=zp/π
ඉහත සමීකරණයේ π යනු අතාර්කික සංඛ්යාවක් බැවින්, දර්ශක කවය යොමුවක් ලෙස ස්ථානගත කිරීම පහසු නොවේ. ගණනය කිරීම, නිෂ්පාදනය කිරීම සහ පරීක්ෂා කිරීම පහසු කිරීම සඳහා, p/π අනුපාතය දැන් කෘතිමව සමහර සරල අගයන් ලෙස නිශ්චිතව දක්වා ඇති අතර, අනුපාතය මොඩියුලස් (මොඩියුලය) ලෙස හඳුන්වනු ලබන අතර එය m ලෙස ප්රකාශ වේ.
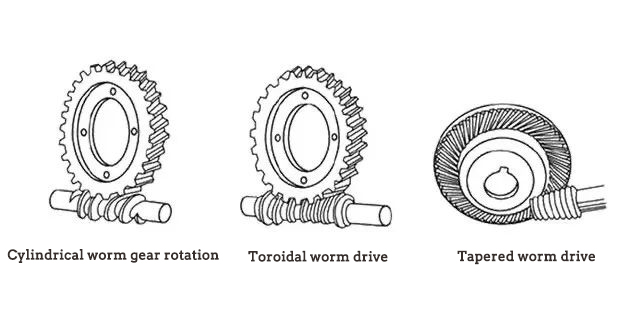
පණුවන් ගියර් වර්ග
පණුවාගේ විවිධ හැඩයන් අනුව, පණුවා සිලින්ඩරාකාර පණුවා ධාවකය, වළයාකාර පණුවා ධාවකය සහ කේතුකාකාර පණුවා ධාවකය ලෙස බෙදිය හැකිය. ඒ අතරින් සිලින්ඩරාකාර පණුවා ධාවකය වඩාත් බහුලව භාවිතා වේ.
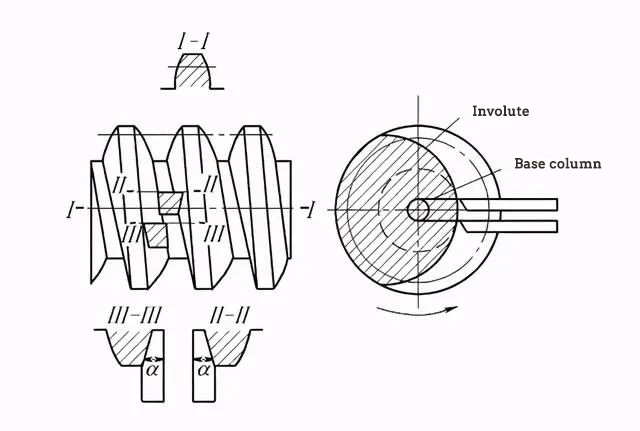
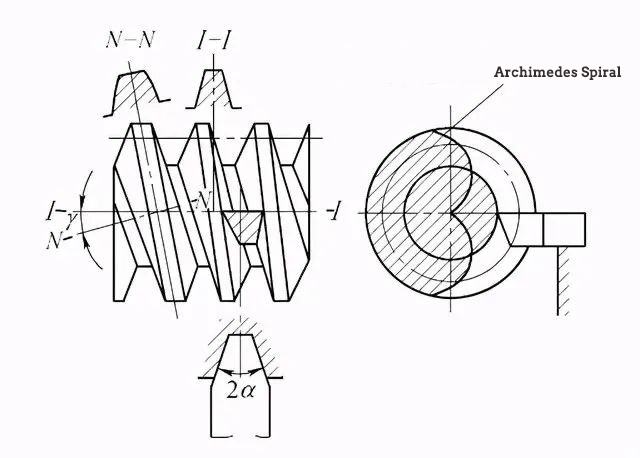
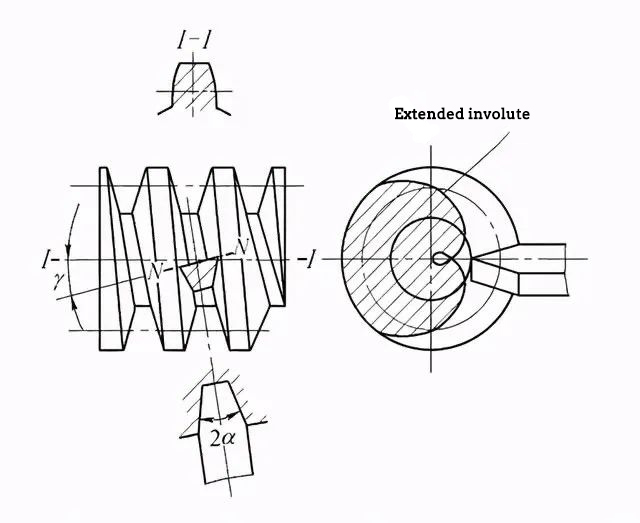
සාමාන්ය සිලින්ඩරාකාර පණු ගියර් බොහෝ දුරට සෘජු බස් තලයක් සහිත හැරවුම් මෙවලමක් සහිත වැසිකිළිය මත කපා ඇත. මෙවලම් ස්ථාපන ස්ථානයේ සහ භාවිතා කරන මෙවලමෙහි විචලනය සමඟ, සිරස් අක්ෂයේ හරස්කඩේ විවිධ දත් පැතිකඩ සහිත පණු ගියර් වර්ග හතරක් ලබා ගත හැකිය: ඉන්වොලූට් පණු ගියර් (ZI වර්ගය), ආකිමිඩීස් පණු ගියර් (ZA වර්ගය), සාමාන්ය සෘජු පැතිකඩ පණු ගියර් (ZN) සහ ටේපර්ඩ් ආවරණය කරන සිලින්ඩරාකාර පණු ගියර් (ZK).
ඉන්වොලූට් වර්ම් (ZI වර්ගය)- තල තලය පණුවා පාදක සිලින්ඩරයට ස්පර්ශක වන අතර, අවසාන දත් ඇතුළත් වන අතර, වැඩි වේගයක් සහ විශාල බලයක් සඳහා සුදුසු වේ.
ආකිමිඩියන් පණුවා (ZA වර්ගය)- අක්ෂ තලයට ලම්බකව දත් පැතිකඩ ආකිමිඩියන් ඉස්කුරුප්පු ඇණ වන අතර, අක්ෂයට ඔබ්බෙන් ඇති තලයේ දත් පැතිකඩ කෙළින්ම, සරල සැකසුම් සහ අඩු නිරවද්යතාවයකින් යුක්ත වේ. (අක්ෂීය සෘජු පැතිකඩ පණුවා ගියර්).
සාමාන්ය සෘජු පැතිකඩ පණුවා (ZN)- නවීකරණය කරන ලද ඇඹරුම් රෝදය සමඟ දත් ඇඹරීමට භාවිතා කළ හැකිය, සැකසීම සරලයි, බොහෝ විට බහු-හිස් පණුවන් සඳහා භාවිතා වේ, සම්ප්රේෂණ කාර්යක්ෂමතාව 0.9 දක්වා.
ඔබට සම්ප්රේෂණය පිළිබඳ කෙටි අවබෝධයක් ඇති බව දැකීමෙන්මූලධර්මයපණුවා ගියර් මෝටර, ඔබට සන්නිවේදනය කිරීමට අවශ්ය වෙනත් යමක් තිබේ නම්, කරුණාකරඅපව අමතන්න!
අපි අපගේ ගනුදෙනුකරුවන් සමඟ සමීපව කටයුතු කරමින්, ඔවුන්ගේ අවශ්යතාවලට සවන් දෙමින් සහ ඔවුන්ගේ ඉල්ලීම් මත ක්රියා කරමු. ජයග්රාහී හවුල්කාරිත්වයක පදනම නිෂ්පාදන ගුණාත්මකභාවය සහ පාරිභෝගික සේවය බව අපි විශ්වාස කරමු.
චැංෂෝ වික්-ටෙක් මෝටර් ටෙක්නොලොජි සමාගම, සීමාසහිත යනු මෝටර් පර්යේෂණ සහ සංවර්ධනය, මෝටර් යෙදුම් සඳහා සමස්ත විසඳුම් සහ මෝටර් නිෂ්පාදන සැකසීම සහ නිෂ්පාදනය කෙරෙහි අවධානය යොමු කරන වෘත්තීය පර්යේෂණ සහ නිෂ්පාදන සංවිධානයකි. සීමාසහිත සමාගම 2011 සිට ක්ෂුද්ර මෝටර සහ උපාංග නිෂ්පාදනය සඳහා විශේෂිත වී ඇත. අපගේ ප්රධාන නිෂ්පාදන: කුඩා ස්ටෙපර් මෝටර, ගියර් මෝටර, ගියර් මෝටර, දිය යට තෙරපුම් සහ මෝටර් ධාවක සහ පාලක.

අපගේ කණ්ඩායමට ක්ෂුද්ර මෝටර සැලසුම් කිරීම, සංවර්ධනය කිරීම සහ නිෂ්පාදනය කිරීම සම්බන්ධයෙන් වසර 20කට වැඩි පළපුරුද්දක් ඇති අතර, විශේෂ අවශ්යතා අනුව නිෂ්පාදන සංවර්ධනය කිරීමට සහ පාරිභෝගිකයින් නිර්මාණය කිරීමට සහාය විය හැකිය! වර්තමානයේ, අපි ප්රධාන වශයෙන් ආසියාවේ, උතුරු ඇමරිකාවේ සහ යුරෝපයේ ඇමරිකා එක්සත් ජනපදය, එක්සත් රාජධානිය, කොරියාව, ජර්මනිය, කැනඩාව, ස්පාඤ්ඤය වැනි රටවල් සිය ගණනක ගනුදෙනුකරුවන්ට අලෙවි කරමු. අපගේ "අඛණ්ඩතාවය සහ විශ්වසනීයත්වය, ගුණාත්මකභාවය-නැඹුරු" ව්යාපාරික දර්ශනය, "පාරිභෝගිකයා පළමුව" වටිනාකම් සම්මතයන් කාර්ය සාධනය-නැඹුරු නවෝත්පාදනය, සහයෝගීතාවය, කාර්යක්ෂම ව්යවසාය ආත්මය, "ගොඩනැගීම සහ බෙදාගැනීම" ස්ථාපිත කිරීම සඳහා පෙනී සිටී. අවසාන ඉලක්කය වන්නේ අපගේ ගනුදෙනුකරුවන් සඳහා උපරිම වටිනාකමක් නිර්මාණය කිරීමයි.
පළ කිරීමේ කාලය: ජනවාරි-30-2023